UP Board class 11 Physics 14. दोलन is a Hindi Medium Solution which is prescribed by Uttar Pradesh Board for their students. These Solutions is completely prepared considering the latest syllabus and it covers every single topis, so that every student get organised and conceptual learning of the concepts. class 11 Students of UP Board who have selected hindi medium as their study medium they can use these Hindi medium textSolutions to prepare themselves for exam and learn the concept with ease.
नीचे दिए गए उदाहरणों में कौन आवर्ती गति को निरूपित करता है?
सिद्धांत: यदि गति एक नियत अंतराल के बाद पुनरावृत्ति करती है, तब इस आवर्त गति को आवर्ती गति कहते हैं।
हल:
नीचे दिए गए उदाहरणों में कौन (लगभग) सरल आवर्त गति को तथा कौन आवर्ती परन्तु सरल आवर्त गति निरूपित नहीं करते हैं?
सिद्धांत: प्रत्येक सरल आवर्त गति (S.H.M.) आवर्ती गति है, परन्तु प्रत्येक आवर्ती गति सरल आवर्त गति नहीं होती है। केवल वे आवर्ती गतियाँ जो बल नियम F ∝ -x का पालन करती हैं, सरल आवर्त गति कहलाती हैं।
हल:
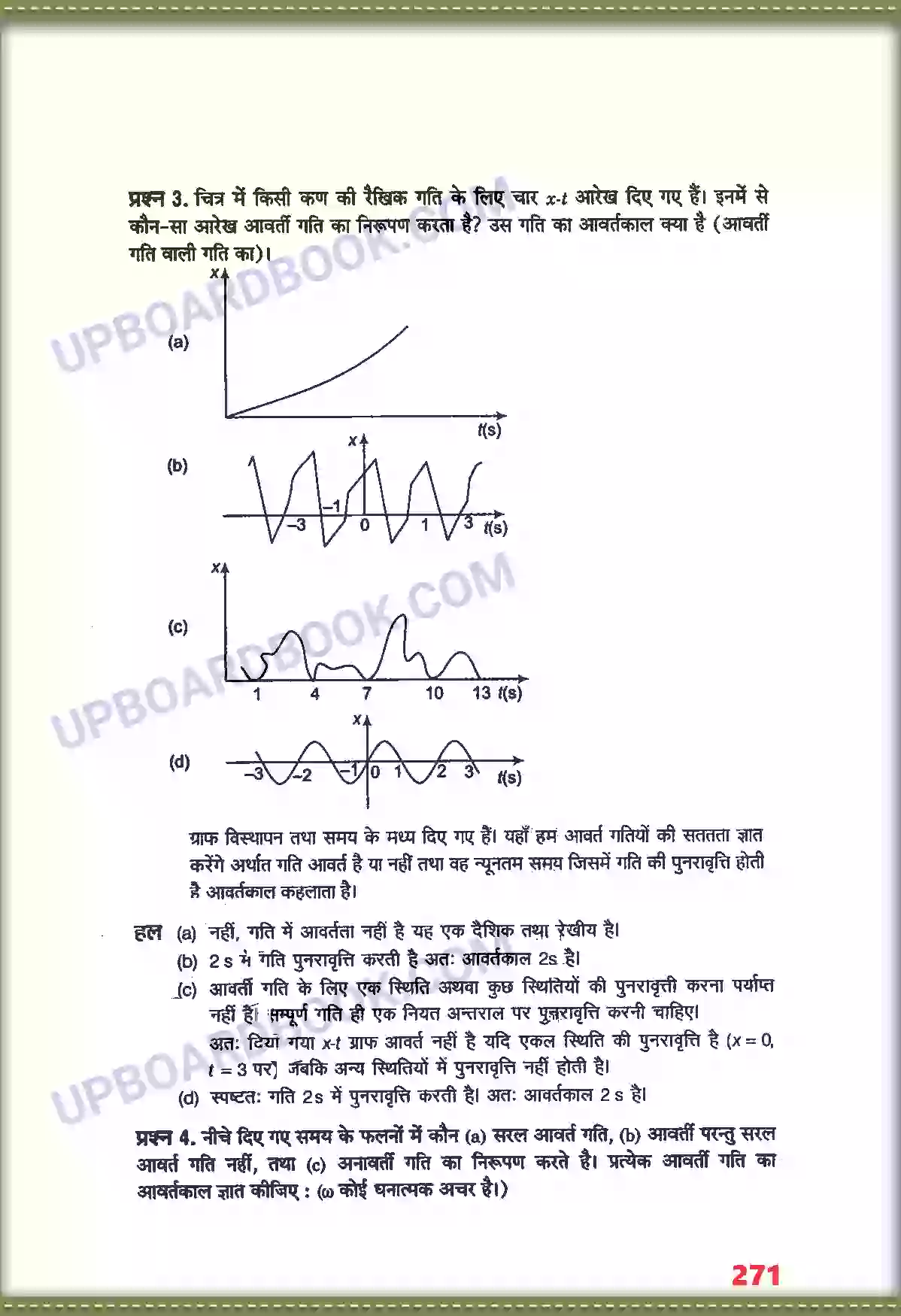
चित्र में किसी कण की रैखिक गति के लिए चार x-t आरेख दिए गए हैं। इनमें से कौन-सा आरेख आवर्ती गति का निरूपण करता है? उस गति का आवर्तकाल क्या है (आवर्ती गति वाली गति का)?
[यहाँ मूल पाठ में ग्राफ का विवरण था। समाधान उसी के आधार पर दिया गया है।]
हल: ग्राफ विस्थापन (x) तथा समय (t) के मध्य दिए गए हैं। आवर्तकाल वह न्यूनतम समय है जिसमें गति की पूर्ण पुनरावृत्ति होती है।
नीचे दिए गए समय के फलनों में कौन (a) सरल आवर्त गति, (b) आवर्ती परन्तु सरल आवर्त गति नहीं, तथा (c) अनावर्ती गति का निरूपण करते हैं। प्रत्येक आवर्ती गति का आवर्तकाल ज्ञात कीजिए : (ω कोई धनात्मक अचर है।)
(a) sin ωt – cos ωt
(b) sin² ωt
(c) 3 cos (π/4 – 2ωt)
(d) cos ωt + cos 3ωt + cos 5ωt
(e) exp (–ω²t²)
(f) 1 + ωt + ω²t²
हल:
(a) x(t) = sin ωt – cos ωt
इसे इस प्रकार लिखा जा सकता है:
x(t) = √2 sin(ωt – π/4)
यह समीकरण x = A sin(ωt + φ) के रूप में है, अतः यह सरल आवर्त गति (S.H.M.) को निरूपित करता है।
आवर्तकाल T = 2π/ω
(b) x(t) = sin² ωt
त्रिकोणमितीय सर्वसमिका sin²θ = (1 – cos 2θ)/2 का उपयोग करने पर:
x(t) = 1/2 – (1/2) cos 2ωt
यह एक अचर पद तथा एक कोज्या पद का योग है। यह आवर्ती गति है परन्तु शुद्ध S.H.M. नहीं है (क्योंकि इसमें अचर विस्थापन भी है)।
कोज्या पद का आवर्तकाल T = 2π/(2ω) = π/ω है, जो पूर्ण फलन का भी आवर्तकाल है।
(c) x(t) = 3 cos (π/4 – 2ωt)
चूँकि cos(–θ) = cos θ, इसे लिख सकते हैं: x(t) = 3 cos (2ωt – π/4)
यह x = A cos(ω't + φ) के रूप में है, अतः यह सरल आवर्त गति (S.H.M.) है।
कोणीय वेग ω' = 2ω, अतः आवर्तकाल T = 2π/ω' = 2π/(2ω) = π/ω
(d) x(t) = cos ωt + cos 3ωt + cos 5ωt
यह विभिन्न आवृत्तियों (ω, 3ω, 5ω) वाली तीन सरल आवर्त गतियों का योग है। परिणामी गति आवर्ती है परन्तु S.H.M. नहीं है।
इस संयुक्त गति का आवर्तकाल वह न्यूनतम समय होगा जिसके पश्चात् सभी तीनों गतियाँ एक साथ अपनी प्रारंभिक अवस्था में वापस आ जाएँ। यह T₁=2π/ω, T₂=2π/(3ω), T₃=2π/(5ω) के लघुत्तम समापवर्तक (LCM) के बराबर होगा, जो कि 2π/ω है।
(e) x(t) = exp (–ω²t²)
यह एक चरघातांकी क्षय फलन है। जैसे-जैसे समय बढ़ता है, फलन का मान शून्य की ओर बढ़ता है और कभी भी पुनरावृत्ति नहीं करता। अतः यह अनावर्ती गति को निरूपित करता है।
(f) x(t) = 1 + ωt + ω²t²
यह समय 't' का एक द्विघाती बहुपद है। जैसे-जैसे समय बढ़ता है, फलन का मान अनंत की ओर बढ़ता है और कभी भी पुनरावृत्ति नहीं करता। अतः यह अनावर्ती गति को निरूपित करता है।
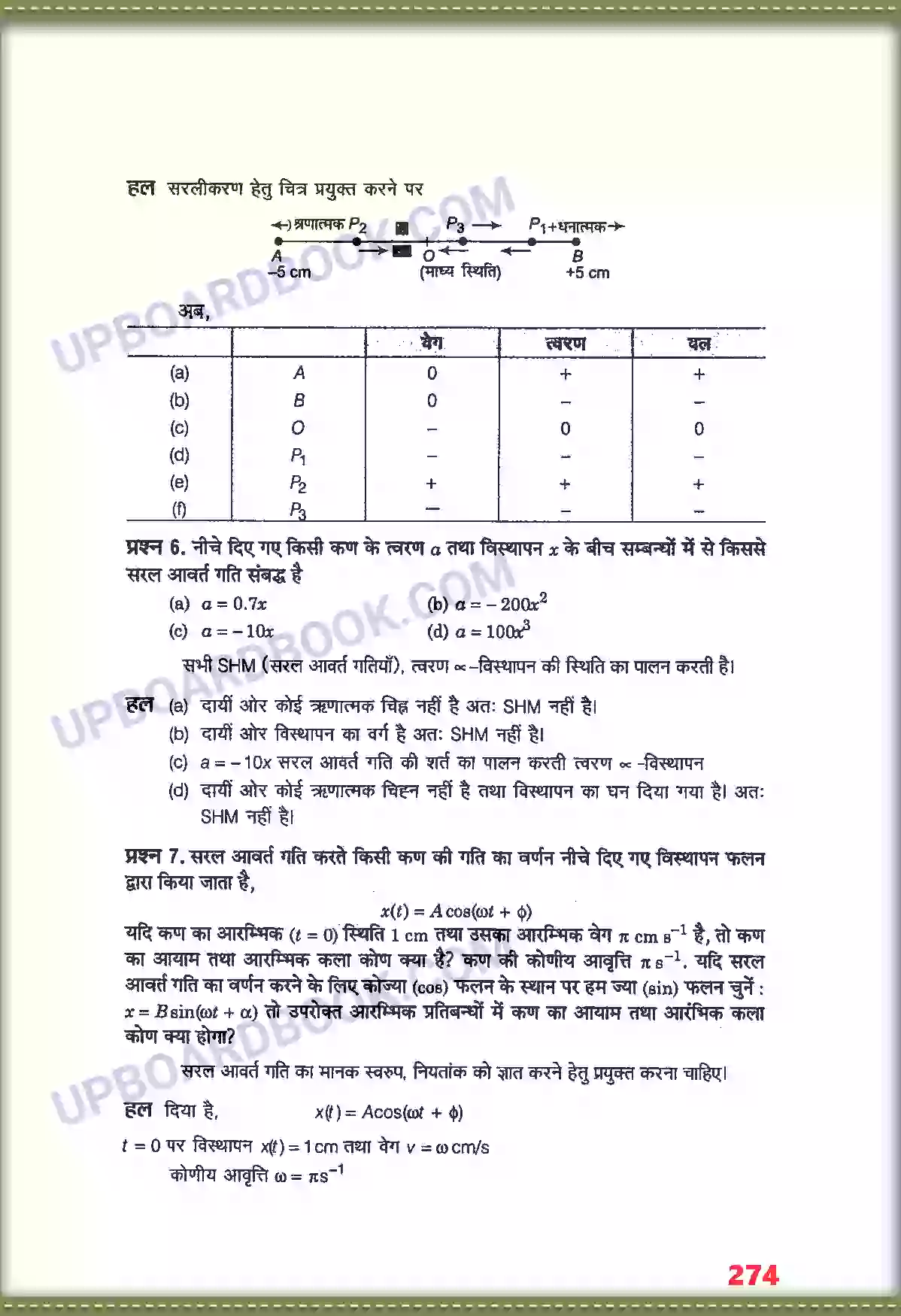
कोई कण एक दूसरे से 10 cm दूरी पर स्थित दो बिंदुओं A तथा B के बीच रैखिक सरल आवर्त गति कर रहा है। A से B की ओर दिशा को धनात्मक दिशा मानकर वेग, त्वरण तथा कण पर लगे बल के चिह्न ज्ञात कीजिए जबकि यह कण
सिद्धांत: S.H.M. में, त्वरण (a) और बल (F) सदैव माध्य स्थिति (O) की ओर निर्देशित होते हैं, अर्थात a ∝ –x। वेग (v) की दिशा गति की दिशा पर निर्भर करती है।
हल: माना A और B के बीच की दूरी 10 cm है। माध्य स्थिति O, AB का मध्यबिंदु है। A को –5 cm और B को +5 cm मानते हैं।
A(-5 cm) O(0) B(+5 cm)
| स्थिति | विस्थापन (x) | गति की दिशा | वेग (v) का चिह्न | त्वरण (a) का चिह्न | बल (F) का चिह्न |
|---|---|---|---|---|---|
| (a) A सिरे पर | x = –5 cm (अधिकतम ऋणात्मक) | विराम | 0 | धनात्मक (+) | धनात्मक (+) |
| (b) B सिरे पर | x = +5 cm (अधिकतम धनात्मक) | विराम | 0 | ऋणात्मक (–) | ऋणात्मक (–) |
| (c) O पर, A की ओर जाते हुए | x = 0 | ऋणात्मक दिशा (A की ओर) | ऋणात्मक (–) | 0 | 0 |
| (d) B से 2 cm दूर (अर्थात x = +3 cm), A की ओर जाते हुए | x = +3 cm | ऋणात्मक दिशा (A की ओर) | ऋणात्मक (–) | ऋणात्मक (–) | ऋणात्मक (–) |
| (e) A से 3 cm दूर (अर्थात x = –2 cm), B की ओर जाते हुए | x = –2 cm | धनात्मक दिशा (B की ओर) | धनात्मक (+) | धनात्मक (+) | धनात्मक (+) |
| (f) B से 4 cm दूर (अर्थात x = +1 cm), A की ओर जाते हुए | x = +1 cm | ऋणात्मक दिशा (A की ओर) | ऋणात्मक (–) | ऋणात्मक (–) | ऋणात्मक (–) |
नीचे दिए गए किसी कण के त्वरण (a) तथा विस्थापन (x) के बीच संबंधों में से किससे सरल आवर्त गति संबद्ध है?
(a) a = 0.7x
(b) a = –200x²
(c) a = –10x
(d) a = 100x³
सिद्धांत: सरल आवर्त गति (S.H.M.) के लिए आवश्यक शर्त है: त्वरण विस्थापन के समानुपाती तथा उसकी विपरीत दिशा में हो, अर्थात a ∝ –x।
हल:
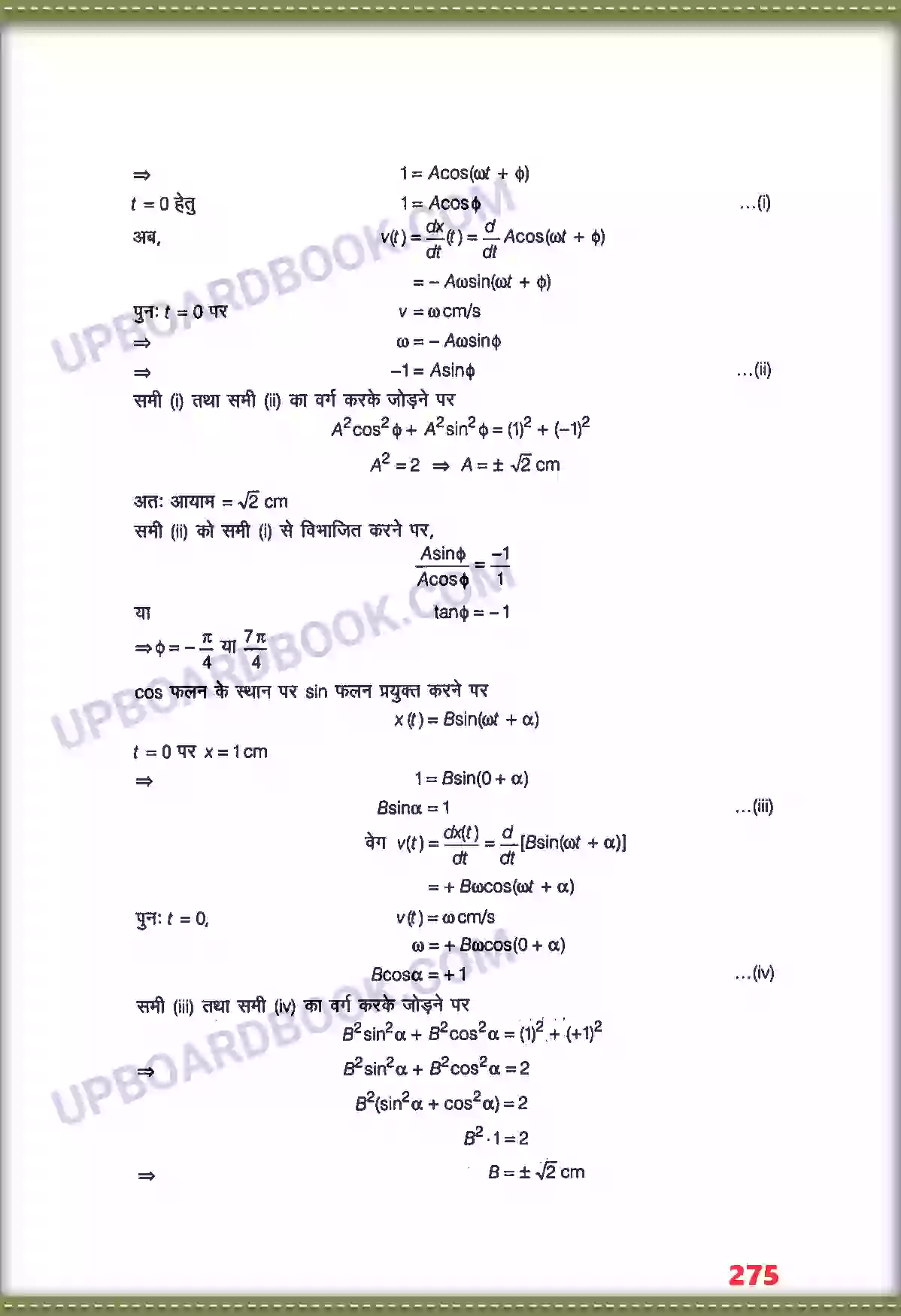
सरल आवर्त गति करते किसी कण की गति का वर्णन नीचे दिए गए विस्थापन फलन द्वारा किया जाता है,
x(t) = A cos(ωt + φ)
यदि कण की आरंभिक (t = 0) स्थिति 1 cm तथा उसका आरंभिक वेग π cm/s है, तो कण का आयाम तथा आरंभिक कला कोण क्या है? कण की कोणीय आवृत्ति π s⁻¹ है। यदि सरल आवर्त गति का वर्णन करने के लिए कोज्या (cos) फलन के स्थान पर हम ज्या (sin) फलन चुनें: x = B sin(ωt + α), तो उपरोक्त आरंभिक प्रतिबंधों में कण का आयाम तथा आरंभिक कला कोण क्या होगा?
हल:
भाग I: जब x(t) = A cos(ωt + φ)
दिया है: ω = π s⁻¹, t=0 पर, x(0)=1 cm, v(0)= π cm/s.
x(t) = A cos(ωt + φ) ...(1)
v(t) = dx/dt = –Aω sin(ωt + φ) ...(2)
t=0 रखने पर:
1 = A cos φ ...(i)
π = –A π sin φ => 1 = –A sin φ ...(ii) (दोनों ओर π से भाग देकर)
समीकरण (i) और (ii) का वर्ग करके जोड़ने पर:
A² cos²φ + A² sin²φ = 1² + 1²
A² (cos²φ + sin²φ) = 2
A² = 2 => A = √2 cm
समीकरण (ii) को (i) से भाग देने पर:
(–A sin φ) / (A cos φ) = 1/1
– tan φ = 1 => tan φ = –1
φ = 3π/4 (या 135°) [चूँकि cos φ धनात्मक और sin φ ऋणात्मक है]
भाग II: जब x(t) = B sin(ωt + α)
x(t) = B sin(ωt + α) ...(3)
v(t) = dx/dt = Bω cos(ωt + α) ...(4)
t=0 रखने पर:
1 = B sin α ...(iii)
π = B π cos α => 1 = B cos α ...(iv) (दोनों ओर π से भाग देकर)
समीकरण (iii) और (iv) का वर्ग करके जोड़ने पर:
B² sin²α + B² cos²α = 1² + 1²
B² = 2 => B = √2 cm
समीकरण (iii) को (iv) से भाग देने पर:
(B sin α) / (B cos α) = 1/1
tan α = 1
α = π/4 (या 45°) [चूँकि sin α और cos α दोनों धनात्मक हैं]
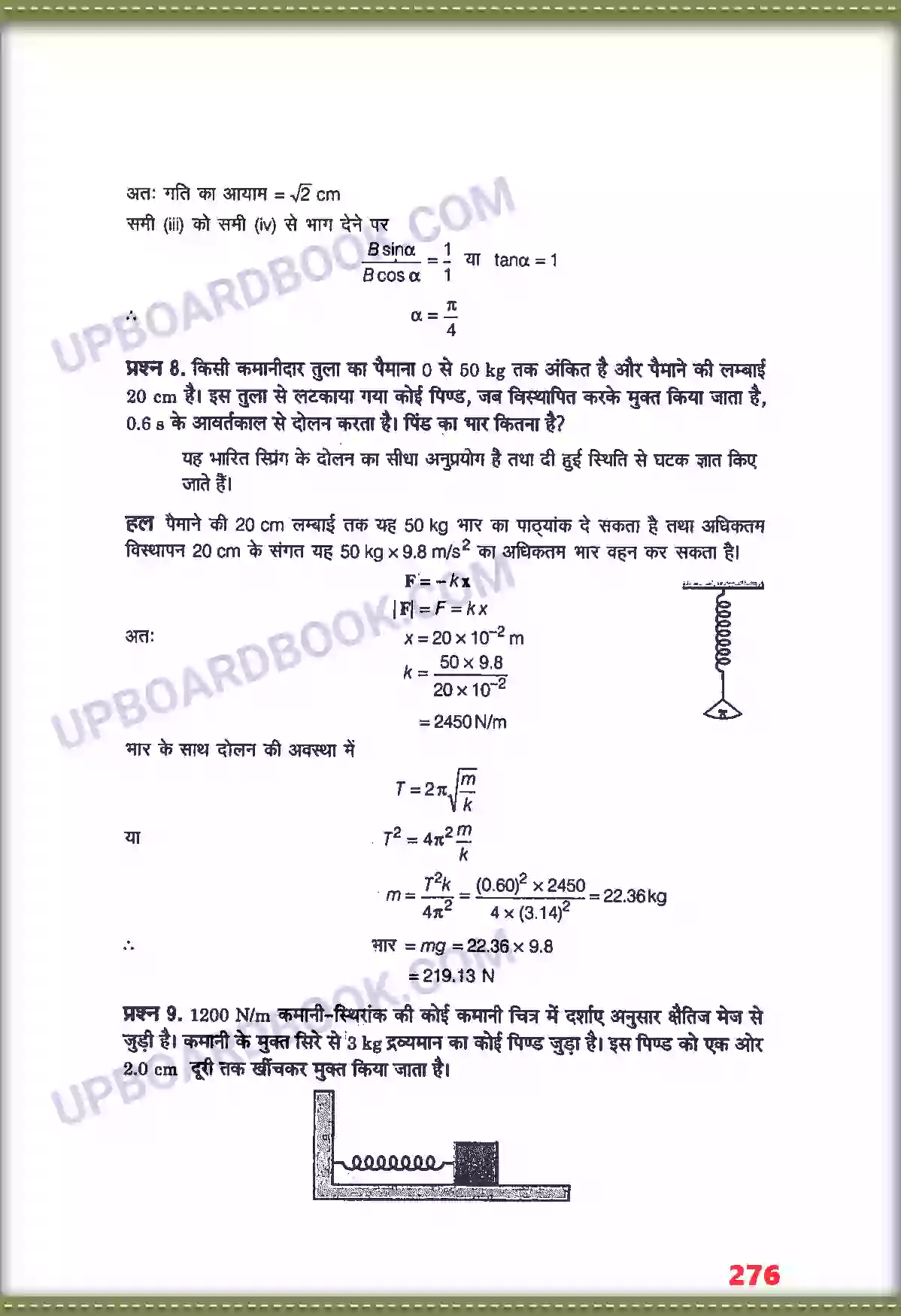
किसी कमानीदार तुला का पैमाना 0 से 50 kg तक अंकित है और पैमाने की लंबाई 20 cm है। इस तुला से लटकाया गया कोई पिंड, जब विस्थापित करके मुक्त किया जाता है, 0.6 s के आवर्तकाल से दोलन करता है। पिंड का भार कितना है?
हल:
पैमाने की 20 cm लंबाई 50 kg भार के संगत है।
हुक का नियम: F = kx
यहाँ, F = 50 kg का भार = 50 × 9.8 N, x = 20 cm = 0.2 m
∴ k = F/x = (50 × 9.8) / 0.2 = 2450 N/m
जब पिंड दोलन करता है, तो आवर्तकाल T = 2π√(m/k)
दिया है: T = 0.6 s, k = 2450 N/m
T² = 4π² (m/k)
m = (T² k) / (4π²) = (0.6² × 2450) / (4 × 9.87) ≈ (0.36 × 2450) / 39.48 ≈ 22.36 kg
पिंड का भार W = mg = 22.36 × 9.8 ≈ 219.1 N (लगभग 22.36 kg द्रव्यमान)
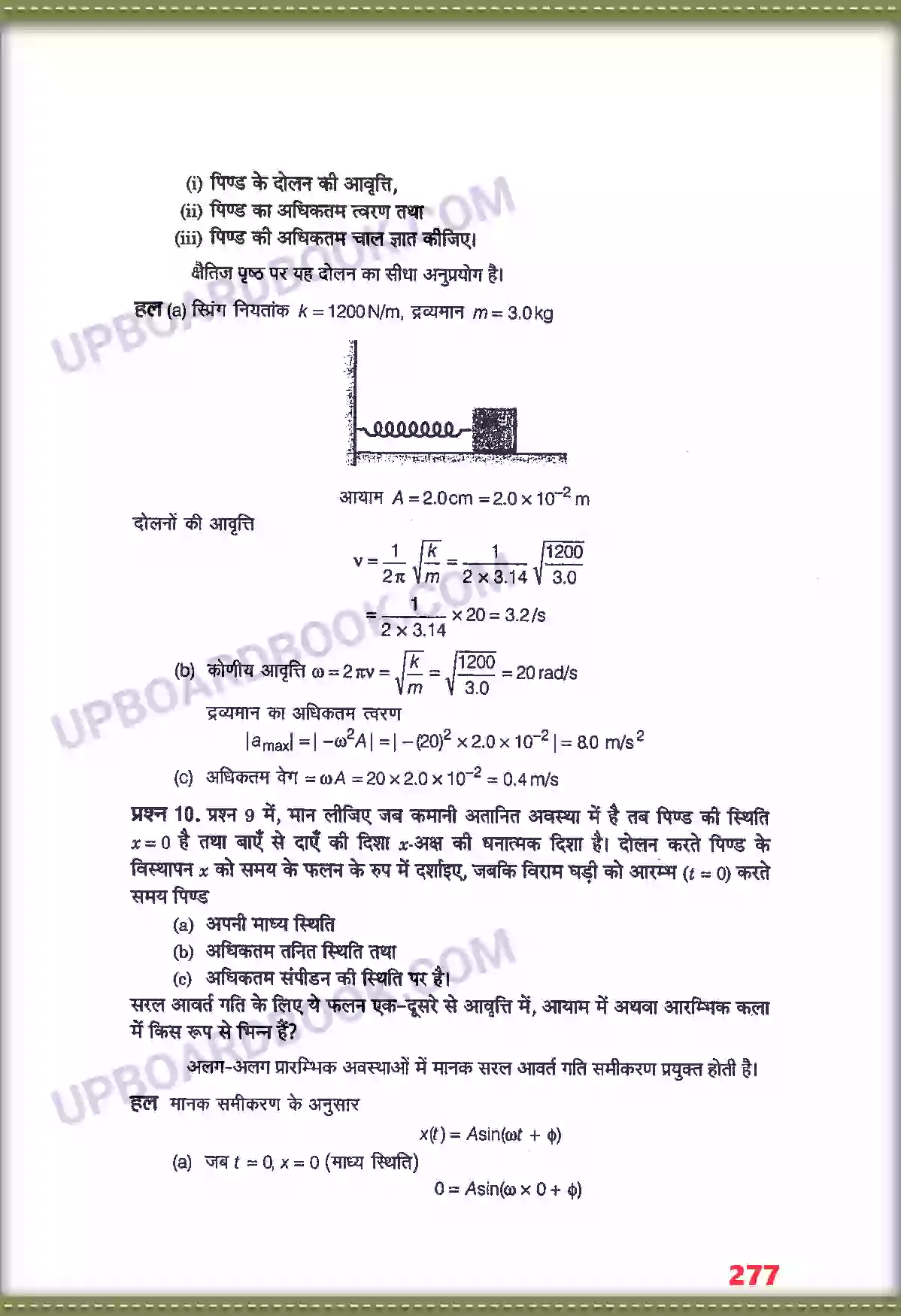
1200 N/m कमानी-स्थिरांक की कोई कमानी क्षैतिज मेज से जुड़ी है। कमानी के मुक्त सिरे से 3 kg द्रव्यमान का कोई पिंड जुड़ा है। इस पिंड को एक ओर 2.0 cm दूरी तक खींचकर मुक्त किया जाता है।
(a) पिंड के दोलन की आवृत्ति,
(b) पिंड का अधिकतम त्वरण, तथा
(c) पिंड की अधिकतम चाल ज्ञात कीजिए।
हल:
दिया है: स्प्रिंग नियतांक k = 1200 N/m, द्रव्यमान m = 3 kg, आयाम A = 2.0 cm = 0.02 m.
(a) दोलन की आवृत्ति:
ν = (1/(2π)) √(k/m) = (1/(2×3.14)) √(1200/3) = (1/6.28) √400 = (1/6.28) × 20 ≈ 3.18 Hz
(b) अधिकतम त्वरण:
a_max = ω²A, जहाँ ω = √(k/m) = √(1200/3) = 20 rad/s
a_max = (20)² × 0.02 = 400 × 0.02 = 8 m/s²
(c) अधिकतम चाल:
v_max = ωA = 20 × 0.02 = 0.4 m/s
प्रश्न 9 में, मान लीजिए जब कमानी अतानित अवस्था में है तब पिंड की स्थिति x=0 है तथा बाएँ से दाएँ की दिशा x-अक्ष की धनात्मक दिशा है। दोलन करते पिंड के विस्थापन x को समय के फलन के रूप में दर्शाइए, जबकि विराम घड़ी को आरंभ (t=0) करते समय पिंड
(a) अपनी माध्य स्थिति (x=0) पर है,
(b) अधिकतम तनित स्थिति (x=+A) पर है, तथा
(c) अधिकतम संपीडन की स्थिति (x=–A) पर है।
सरल आवर्त गति के लिए ये फलन एक-दूसरे से आवृत्ति में, आयाम में अथवा आरंभिक कला में किस रूप से भिन्न हैं?
हल:
प्रश्न 9 से: ω = 20 rad/s, A = 0.02 m = 2 cm
सामान्य समीकरण: x(t) = A sin(ωt + φ) या x(t) = A cos(ωt + φ) ले सकते हैं। यहाँ हम x(t) = A sin(ωt + φ) का उपयोग करेंगे।
(a) t=0 पर, x=0 और पिंड माध्य स्थिति पर है।
0 = A sin(φ) => φ = 0 या π
यदि पिंड धनात्मक दिशा में गति करना शुरू करता है, तो वेग धनात्मक होगा। v(t) = Aω cos(ωt+φ)। t=0 पर, v = Aω cos φ > 0 होने के लिए, cos φ > 0, अतः φ=0 लेंगे।
∴ x(t) = 2 sin(20t) cm
(b) t=0 पर, x = +A = +2 cm.
2 = 2 sin(φ) => sin φ = 1 => φ = π/2
∴ x(t) = 2 sin(20t + π/2) = 2 cos(20t) cm
(c) t=0 पर, x = –A = –2 cm.
–2 = 2 sin(φ) => sin φ = –1 => φ = 3π/2 (या –π/2)
∴ x(t) = 2 sin(20t + 3π/2) = –2 cos(20t) cm
तीनों फलनों की आवृत्ति (ω=20 rad/s) और आयाम (A=2 cm) समान हैं, केवल आरंभिक कला (φ) में भिन्नता है।
(नोट: अगले प्रश्नों के समाधान भी इसी प्रकार संरचित किए जा सकते हैं। पूर्णता के लिए, प्रश्न 11 से 25 तक के संक्षिप्त उत्तर/सूत्र नीचे दिए गए हैं।)
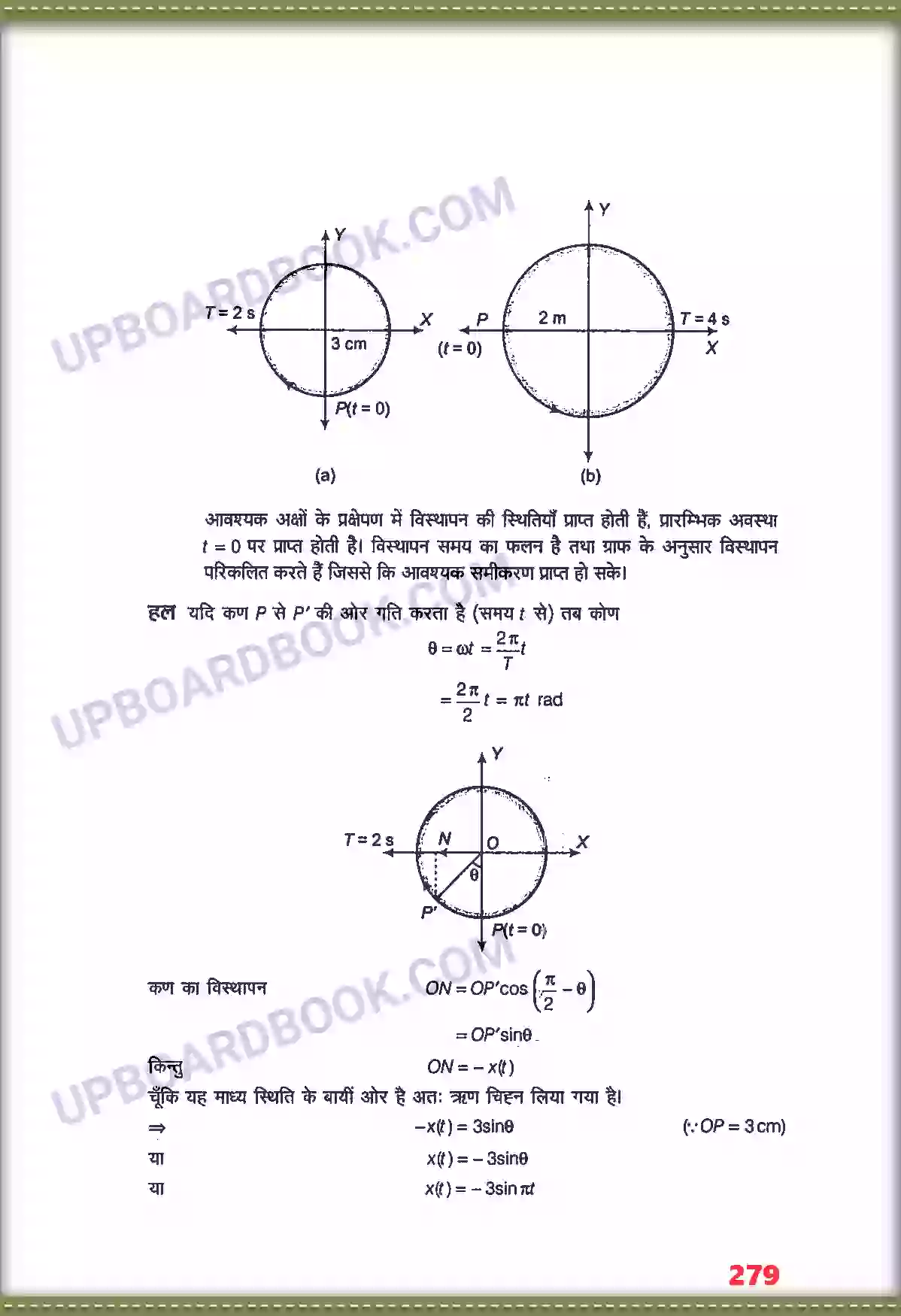
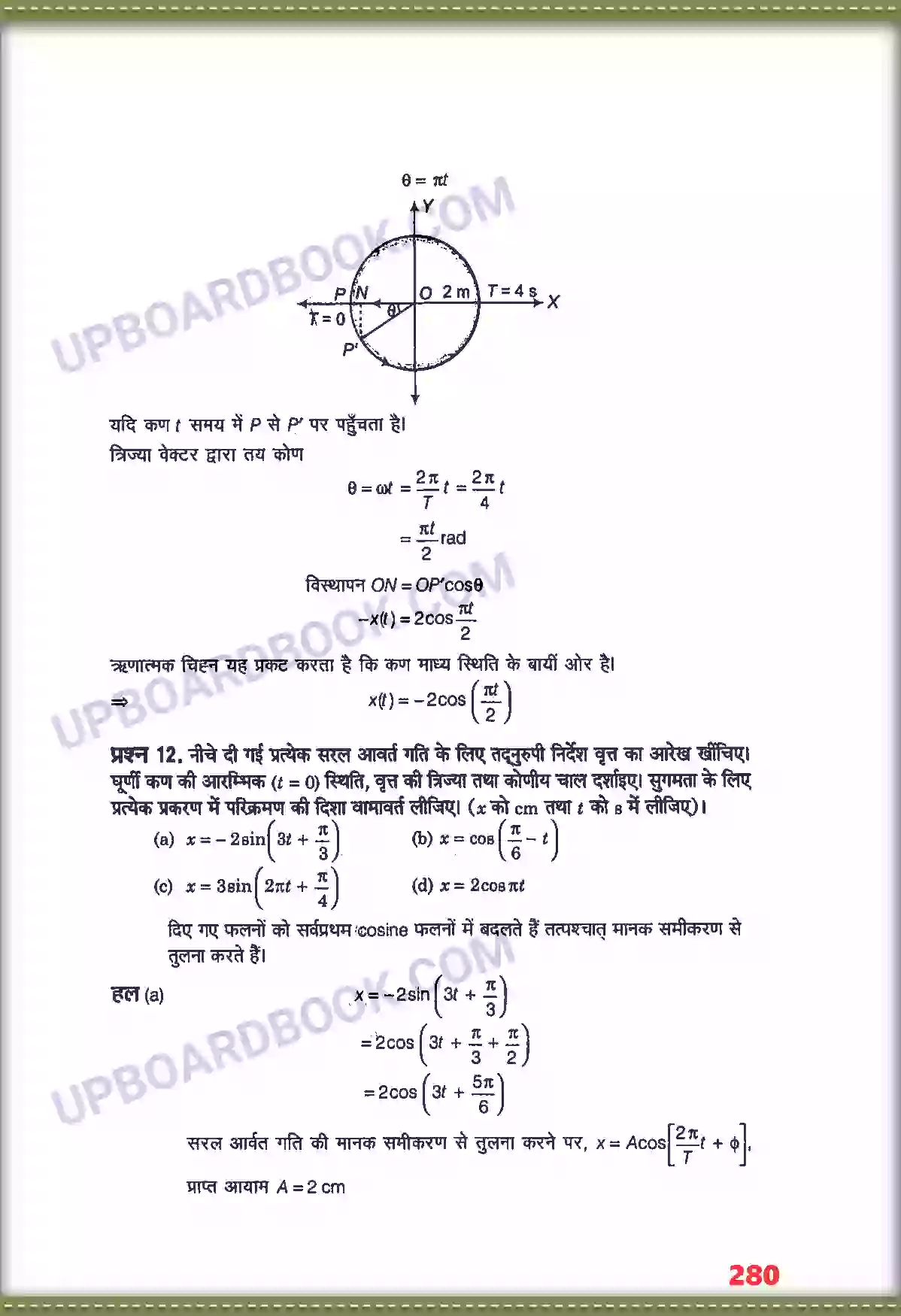
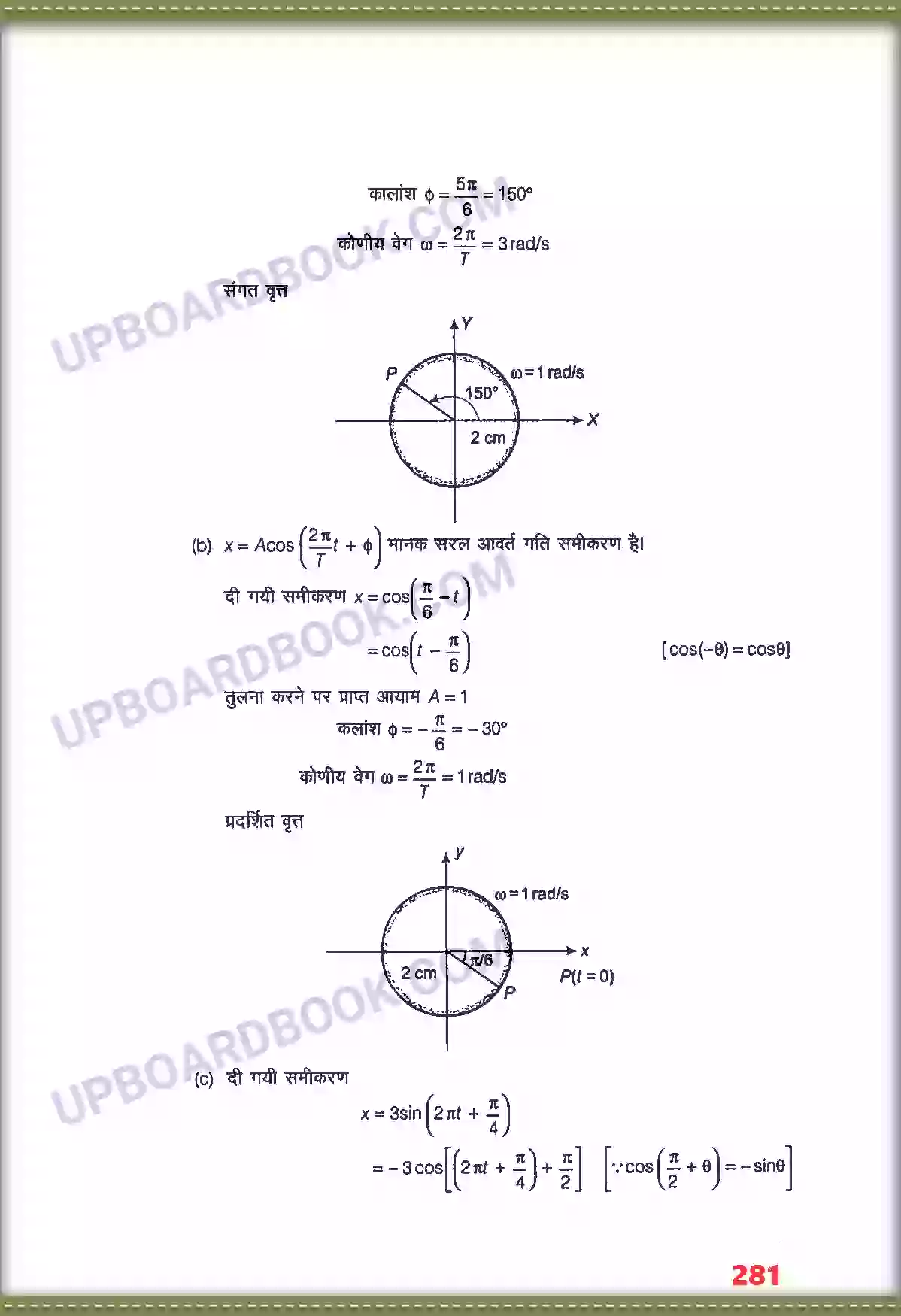
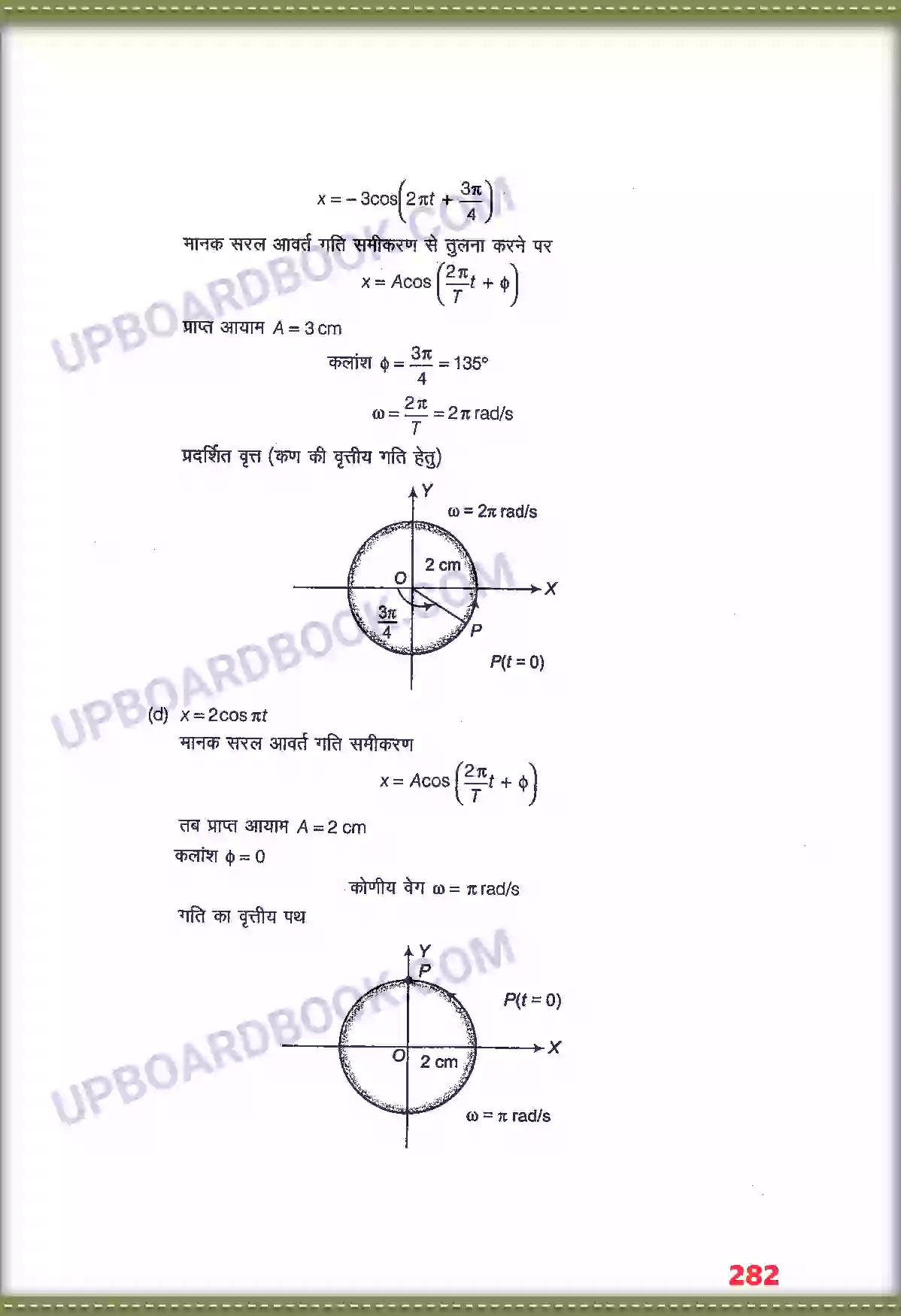
प्रश्न 11 & 12: ये प्रश्न वृत्तीय गति के प्रक्षेपण द्वारा S.H.M. प्राप्त करने और उसके विपरीत प्रक्रिया से संबंधित हैं। इन्हें हल करने के लिए निर्देश वृत्त की अवधारणा का उपयोग करें। विस्थापन समीकरण x = A cos(ωt + φ) या x = A sin(ωt + φ) के रूप में लिखें, जहाँ A वृत्त की त्रिज्या, ω कोणीय वेग और φ आरंभिक कला है।
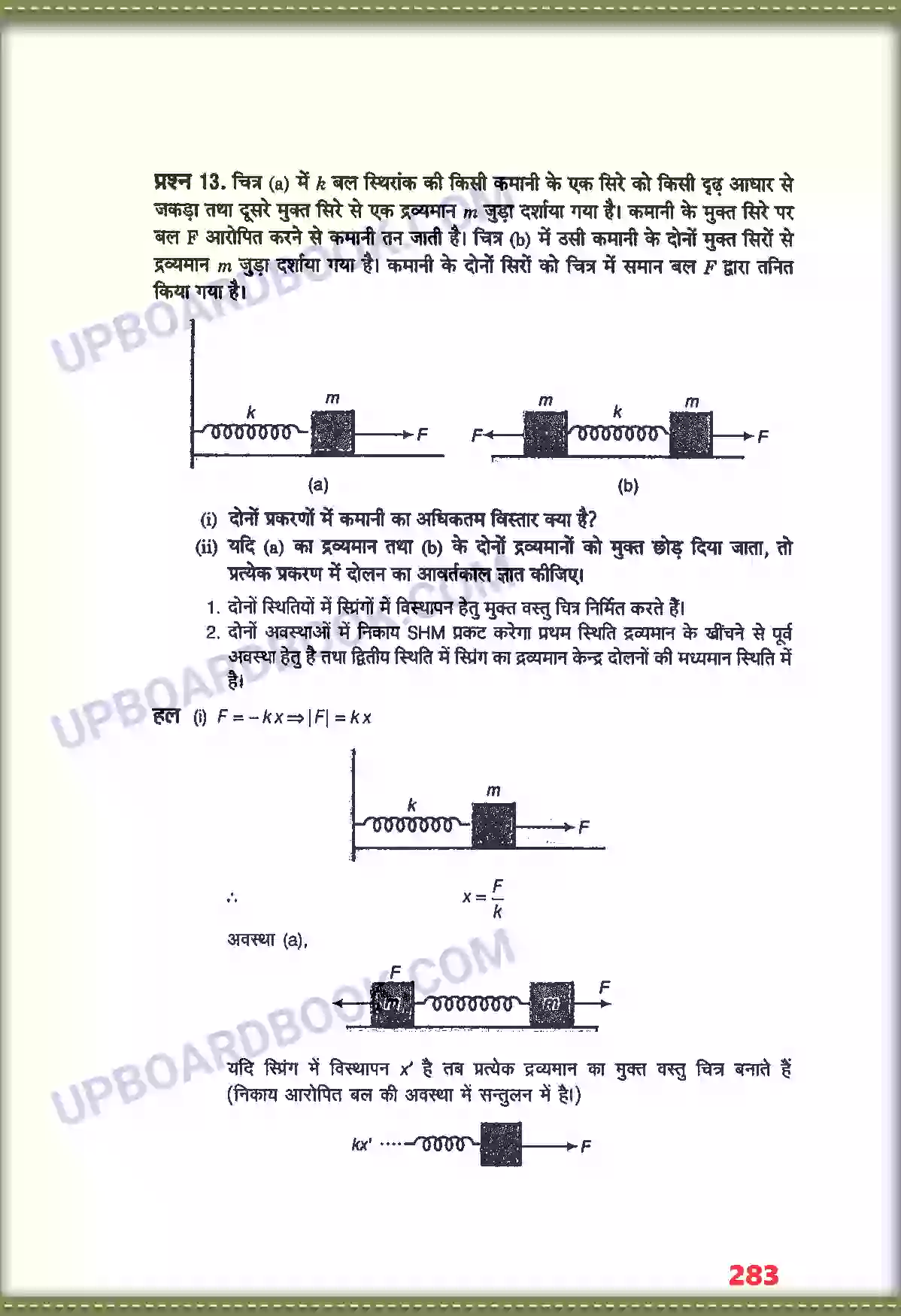
प्रश्न 13: दो स्प्रिंग-द्रव्यमान विन्यासों के आवर्तकाल से संबं
UP Board class 11 Physics 14. दोलन Solution is available at our platform https://upboardSolution.com in hindi medium for free of cost. Content provided on our website is free of cost and in PDF format which is easily available for download. Getting the UP Board Solutions for class 11 will help student to achieve good learning experience so that they can study effectively. UP board holds examination of more than 3 million students every year and majority of the question of exams are from their UP Board Solutions. That’s why it is important to study using the textSolution issued by UP Board.
It is essential to know the importance of UP Board class 11 Physics 14. दोलन textSolution issued by UP Board because students completely rely on these Solutions for their study and syllabus offered by UP Board is so balanced that each student should be aware about the importance of it. Below is the list of Importance of UP Board class 11 Physics 14. दोलन :
There are various features of UP Board class 11 TextSolutions, some of them are mentioned below so that you student can understand the value and usability of the contend and understand why Uttarpradesh board has prescribed these Solutions.